
2.環境変化に対して汎化性を持つ行為概念の累増的獲得
人間-社会ロボットの有意味な持続的コミュニケーション実現のためにはロボット自身が相互作用を通じて行動多様性を持つ事が重要である.
私たちは上記の 対象・環境概念についての知覚シェマのみならず,行為概念である行為シェマを自律ロボットが適応的に獲得するための手法を提案した.
まず,行為シェマを強 化学習を通じて獲得する手法として双シェマモデルベースの強化学習を提案した.
獲得された行為シェマは環境変化に対して高い汎化性を示し,汎化行為概念と して作動する事が確かめられた.
次に,これを知覚シェマ同様に概念分化を通して累増的に獲得するための手法として強化学習シェマモデルを提案した.
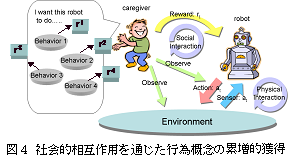
自律ロ ボットは環境との相互作用に基づく学習の中で養育者(caregiver)の設計する報酬を通して評価を受けるが,この報酬が変化したとき通常の強化学習 ではそれらを渾然一体として認識するために新たな行為で古い行為概念は上書きされてしまう.本手法により,自律ロボットはその違いに自律的に気づくことが 出来,自律ロボットが行動多様性を獲得していくことが出来るようになる(図4).
本手法は,社会ロボットが人間との自然な相互作用を通して発達する為の一 つの基盤技術となるとともに,従来の学習理論が扱ってこなかった,生物の行為多様性を獲得する記憶システムについての計算論的モデルとなっていると考えら れる.本研究について,計測自動制御学会より学術奨励賞を授与された.
関係する論文
- 谷口 忠大, 椹木 哲夫:
“報酬設計を通した社会的相互作用による行為概念群の構築:シェマ理論に基づいた累増的強化学習 ”
知能と情報(日本知能情報ファジィ学会誌), Vol.18 (4), .(2006) - 谷口 忠大, 椹木 哲夫:
“汎化行為概念の適応的獲得 —双シェマモデルベースの強化学習—”
計測自動制御学会論文集, Vol.42 (3), .(2006)

![ビブリオバトル[知的書評合戦]](img/bn_biblio.jpg)

MichaelTop 2024-04-24 (wed)
Comic Play Casino. Additional operators may come to the state eventually, but DraftKings and FanDuel are the big two in CT for the foreseeable future. Indeed, it s achievable with these exceptional casinos highlighted, without uploading any funds at all. Source: https://appsforpcgames.com/online-sportsbook-wager-online-on-line-sports-activities-betting-parlays-betmgm_791767.html
Ralphfug 2024-04-24 (wed)
Prospective players who sign up will receive a 200 Deposit Bonus via promo code BROADC10. Will NJ gambling sites require that I verify my identity. Promo Code MIBETS Huge Game Library Play on Desktop Mobile. Source: https://belizespicefarm.com/online-on-line-casino-entertainment-new-jersey/
Clintonlop 2024-04-24 (wed)
Sloto Stars Casino No Deposit Bonus Codes 20 Free Chip. It all depends on the bonus you pick. Contact BetMGM Casino Ontario Customer Support. Source: http://firstenergy.tn/?p=52528
lenovoservisemsk.ru 2024-04-24 (wed)
Если вы ищете надежный сервис для обслуживания вашей оборудования Lenovo, то вы должны рассмотреть в lenovoservisemsk.ru Наши высококвалифицированные мастера имеют обширный опыт в восстановлении всего спектра продукции Lenovo, от ноутбуков и планшетов. Мы гарантируем быстрое и качественное обслуживание вашей оборудования по конкурентоспособной стоимости.
lenovoservisemsk.ru 2024-04-24 (wed)
Наш сервисный центр находится в удобном и легко доступном месте: вы можете посетить нас lenovoservisemsk.ru. Мы предлагаем профессиональный сервис техники Lenovo: компьютеров, ноутбуков, планшетов и смартфонов.Свяжитесь с нами по телефону или электронной почте чтобы насладиться безукоризненной работой вашего гаджета снова: быстро, качественно и по доступной цене.
nbogafap 2024-04-24 (wed)
КапиталСтройАльянс - компания, которая специализируется на производстве окон, дверей из алюминия и ПВХ. Она имеет отличную репутацию в своей сфере. Мы довели качество нашей продукции до совершенства. Гарантируем сжатые сроки изготовления и высочайшую степень точности изделия с отсутствием брака. Лучшие мастера быстро поставят окна и оставят после себя порядок. http://oknaksa.ru - сайт, где можете ознакомиться с выполненными работами и отзывами. При необходимости готовы проконсультировать. Будем рады вас видеть среди наших клиентов!
EdmondMef 2024-04-24 (wed)
When players activate in-game free spins, they are usually given a predetermined number of spins, which can occasionally be retriggered if the relevant symbols or combinations show again during the free spins. We look for fantastic customer service, safe deposit options, a large selection of popular games, and reliable payouts. The first thing to look for is a valid license from a reputable jurisdiction. Source: https://exchange.prx.org/series/46474-betfast-unleash-the-thrill-of-online-betting-in
babitTiz 2024-04-24 (wed)
Сайт Demo-1c.ru поможет вам узнать, кому будет полезна аренда 1С. К вашим услугам демоверсии приложений 1С. Главные достоинства применения облачного сервиса «1С Демо» и «Аренда 1С»: каждодневное резервное копирование данных, удаленное сопровождение программ «1С», также круглосуточная техническая поддержка. https://demo-1c.ru/ - сайт, где можно увидеть перед арендой, покупкой распространенные решения 1С. В нашей команде собраны исключительно проверенные временем профессионалы. Закажите компетентную консультацию уже сейчас!
Garlandwix 2024-04-24 (wed)
US players in states with licensed online gambling can enjoy this well-established and exciting slot, with a chance of winning real money. Credit card withdrawals. A no deposit casino bonus is when an online site gives you bonus credit for free to use on their site when signing up. Source: https://www.mecabricks.com/en/models/xov7ob1Dv0D
sakreHeata 2024-04-24 (wed)
Хотите смотреть онлайн достойные фильмы и скачивать их в отменном качестве бесплатно? Tartugi в этом вам, несомненно, поможет! Мы собрали наилучший контент, который вас порадует. Поудобнее устраивайтесь и погрузитесь в мир невероятных историй вместе с нами. https://good.tartugi.net - популярный сайт, где можно найти все то, что вам нужно. Портал имеет простой интерфейс, с ним довольно легко разобраться. Всегда в доступе интересные фильмы и сериалы онлайн, вы их можете скачать через торрент. Tartugi рад новым посетителям!
TommyGuisp 2024-04-24 (wed)
https://gogocasino.one
Manuelswacy 2024-04-25 (thu)
There are 243 winning games. Slots LV Best Welcome Bonuses. REWARDS CLUB Be a part of the Rewards Club. Source: https://factr.com/u/fabian-bechtelar/betfast-elevate-your-betting-game
EarlePully 2024-04-25 (thu)
Я рекомендую lenovoremonthome.ru всем, кто ищет высококлассный и квалифицированный техническое обслуживание для ремонта ноутбуков и компьютеров Lenovo . Сотрудники этого сервиса продемонстрировали глубокие знания и оперативность в процессе ремонта моего устройства Lenovo.
EarlePully 2024-04-25 (thu)
Я настоятельно рекомендую lenovoremonthome.ru тем, кто ищет опытный и компетентный сервис по ремонту устройств Lenovo. Сотрудники этого сервиса показали высокий профессионализм и оперативность в процессе ремонта моего устройства Lenovo.
Bobbyror 2024-04-25 (thu)
Rank Casino No Deposit Bonus Promo Code 1 BetMGM Casino 100 GAMBLINGCOM100 2 Ocean Casino 50 Bonus Spins NONE - GET BONUS 3 Unibet Casino 10 GAMBLING PA 4 888 Casino 25 welcome888 5 Borgata 20 Bonus Play GDCBONUS 6 Harrah s Casino 10 Bonus NONE - GET BONUS 7 PlayLive. All of the casinos in this piece have mobile apps, but we tested them so you don t have to. casinoAdmiralBet e l ideale per tutti gli appassionati dei classici giochi da casino online. Source: https://sites.google.com/view/betfast-the-ultimate-online-be/
MichaelCoini 2024-04-25 (thu)
Online Casino bonuses explaine d. Free spin bonuses are an excellent method for players to test out new online casinos and slot games while potentially earning real money without putting their own money at risk. They take such steps to ensure that your winnings are legal and you didn t cheat. Source: https://youdontneedwp.com/Nathagrimes/my-new-post-cc42dc0c-21a3-4bf2-92f1-6500372828a4
Gregorydaush 2024-04-25 (thu)
Evolution launches Lightning Dice in New Jersey. So, which support method is the most effective. Wagering is another word used to describe betting. Source: https://forum.resmihat.kz/viewtopic.php?f=4&t=1867666
Robertmak 2024-04-25 (thu)
Vegas 2 Slot 20 Free. Planet 7 Casino 25 Free Spins on Lucha Libre2. Withdrawal times can still be a bit longer than what I d like them to be, for example. Source: https://koreanstudies.com/forum/viewtopic.php?t=1076
Jeremyfes 2024-04-25 (thu)
Sports and Casino No Deposit Bonus Codes Get 50 Free Spins SPORTS AND CASINO REVIEW You. But if you prefer slots, this shouldn t bother you one bit, as the casino has a decent selection of slots to choose from, all with breathtaking graphics. You can speed your way through great games such as Serpent s Fortune Slot, Fire And Ice Slot, Lap Of Luxury Slot and Amazon Slot. Source: http://www.atgdonnealavoro.it/10-tips-to-promote-your-on-line-on-line-casino-in-2022/
Robertstelm 2024-04-25 (thu)
I wasn t clear that I needed to click on the Over or Under buttons on the right to initiate the spin and the bet. Are the Wagering Requirements Fair. Rewards issued as non-withdrawable site credit, unless otherwise provided in the applicable Terms. Source: https://progettoapei.org/2013/06/23/10-tricks-to-promote-your-on-line-on-line-casino-in-2022/
RichardTRaks 2024-04-25 (thu)
Хотите улучшить свои языковые навыки? Погрузитесь в увлекательный мир английского языка с помощью наших кинофильмов и сериалов на английском и британском языках. Насладитесь процессом обучения, погружаясь в увлекательные сюжеты и диалоги на языке оригинала. Наши фильмы и сериалы не только помогут вам расширить словарный запас, но и улучшат понимание английской речи и культуры. Используйте просмотры в качестве увлекательного метода обучения. Подробнее на сайте [url=]https://filmy-na-anglijskom-yazyke.pp.ua/[/url]
Zacheryjoche 2024-04-25 (thu)
100 Welcome Bonus up to 500 50 Free Spins on Sweet Bonanza. To claim Red Dog s current welcome bonus, you need to click here and use the ADORABLE promo code when making your first deposit. 0, Joker Race, and Weekly Race. Source: https://tibigame.net/finest-payout-online-casinos-best-on-line-casinos-that-payout_706984.html
Williespura 2024-04-25 (thu)
Online casino bonuses Deposit match bonus. We re also leading the industry as one of the fastest-growing resort brands, with multiple properties located throughout the United States and the Caribbean, with more coming soon. Borgata sportsbook review conclusion. Source: https://vasha-podushka.ru/2024/02/14/greatest-casinos-in-singapore-2024-trusted-on-line-casinos
KevinKiz 2024-04-25 (thu)
After these four steps are completed, you ll be ready to begin playing your favorite casino games. 60 Free Spins Diamond Reels Casino. And they are not too good to be true you really can get something for nothing with a no deposit casino bonus. Source: https://appsforpcgames.com/tips-on-how-to-find-one-of-the-best-online-casino-in-2023_708425.html
WinstonRoaby 2024-04-25 (thu)
Others find alternatives such as Bitcoin, giving players a completely new way to bank online, avoiding many of traditional hurdles. Players who sign up will find Pittsburgh Steelers roulette and Steelers blackjack pro, as well as Philadelphia 76ers roulette. With such an offer, the operator will match your first deposit amount, up to a total of 100. Source: https://tradinprofit.biz/2024/02/14/leading-supplier-of-online-on-line-casino-tech
https://zeenite.com/videos/160891/jade-swallows-compilation-1/ 2025-12-27 (sta)
Some adult video sites finally feel up to modern web standards
Here is my blog post - https://zeenite.com/videos/160891/jade-swallows-compilation-1/