
1. 自律ロボットによる対象・環境概念の自己組織化と身体依存性
自律適応系の対象・環境概念生成の側面に注目し,自律ロボットが関わる環境・対象を表象する内的表象を自律的に構成する機械学習手法として双シェマモデルを構築し,その特性や有用性について 一連の研究を行った.
このモデルにおいて自律ロボットは,動的環境に含まれる定常状態において身体的相互作用のダイナミクスを知覚シェマとして組織化し,その変化点に自発的に気づき知覚シェマを分化させる.
シェマモデルとは発達心理学者のJ. Piagetが 幼児の認知発達を説明するために提案した認知システムのモデルであるが,我々はそれに再解釈を与え計算論的モデルとして構築した.

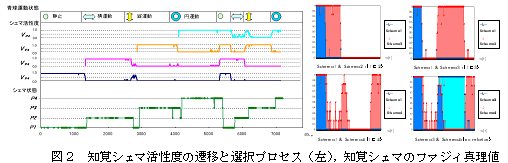
図1は実験において用い たpan-tiltの二自由度の運動系を有し,二つのカメラを感覚系に有した顔ロボットである.実験を通じて,顔ロボットは自らの自己閉鎖的な学習過程の みから外部で切り替えられる環境状況を表象する4つの内的表象を組織化した.そのプロセスを図2に示す.
また,これらの知覚シェマの活性度を,各状態のそ のシェマへの帰属度を表すファジィメンバシップ関数と解釈したところ,その4つの概念間に図2に示すようなボトムアップに生成された包含関係が成立するこ とも観察された.
また,このような自らの感覚運動器のみを通した環境認識の発生は,自らの身体性の強い影響下にある.身体性と内的表象生成の関係性という議論は,実験的に は調査し難いものの,生態学的認識論や記号論,認知言語学等の学際的分野においても非常に強い興味を持たれている.
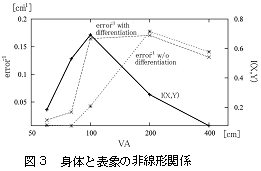
そこで,身体パラメータと内的表象の生 成数は単純な比例関係に有るのではなく非線形な関係性を持ち,さらにその存在が行動のパフォーマンスに影響を与えているとの仮説を立て,上記の表象生成モ デルを用いた数値実験により,構成論的な方法で,その仮説を擁護する数値実験結果を得た(図3).
従来の実際の人間の認知実験では,踏み込めない領域を構 成論的手法で切り開いた新規性が評価され,当研究についてシステム制御情報学会より論文賞という形で評価を受けた.また,当手法の数理的側面をより厳密に すると共に,非線形系への拡張と,その他手法との比較検討を行い報告した.
関連する論文
- 谷口 忠大, 椹木 哲夫:
“身体と環境の相互作用を通じた記号創発:表象生成の身体依存性についての構成論”
システム・制御・情報学会誌, Vol.18 (12), .(2005)
システム・制御・情報学会学会賞「論文賞」受賞 - 谷口 忠大, 椹木 哲夫:
“双シェマモデル”
人工知能学会論文誌, Vol.19 (6), pp.493-501 .(2004)[LINK]

![ビブリオバトル[知的書評合戦]](img/bn_biblio.jpg)
