
3.自律適応系の自己閉鎖性を前提とした意図推定,記号創発 (主に H17-H18)
自律ロボットが獲得した行為概念に,近年,大脳新皮質,海馬等で発見されたSTDP則と呼ばれる学習則(図6)で駆動される神経回路網を接続することで,いわゆる合図のようなインパルス型の情報と行為概念の想起を実時間的に連動させることが出来る事を示した.
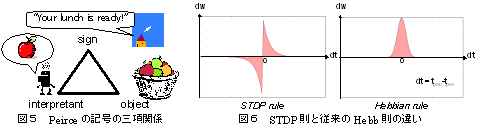
これにより,記号論の創始者C.S. Peirceが唱えた記号の構成要件である<サイン・対象・解釈項>の三項関係を有した記号解釈のプロセス(図5)を完全に自己閉鎖的な学習の中で自律ロボットにボトムアップに発見させる事が出来た.
この学習機構は強化刺激のみならず弁別刺激をも包括的に含めたオペラント条件付けの計算論モデルとして捉えられる.
本提案の力点は,外部評価的には,そのオペラント条件付けの統合的なモデル化という新規性にあるが,内部評価的には,申請者が研究を進める記号創発論, つまり,記号や意味を自律適応系の環境や他者との相互作用を通した創発性の概念の中で捉えるという,ボトムアップ・アプローチによる研究に於いて,記号の 意味解釈の組織化という概念に対して一定の計算論的位置づけを与えたという点にある.複数人のコミュニケーションや社会的な議論に発展させるための土台と なる議論である.
これらの議論を複数エージェント間のコミュニケーションの議論に発展的に進めて行くためにボトムアップな適応学 習過程を通じての他者の意図推定や,他者とのコミュニケーションの為の記号創発を議論する必要がある.
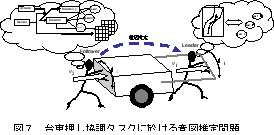
では他者の行動を直接観測できず,自らの感覚運動系 に閉じたような自律適応系が協調作業を行う他者の意図を推定し,協調的にタスクを実行するといったことが可能かという問題に接近し,モジュール型強化学習 機構を援用する事で一定の仮定の下可能であることを示した.本研究についてシステム制御情報学会より奨励賞,砂原賞を授与された.
関係する論文
- 谷口忠大,椹木哲夫,堀口由貴男
“他者理解の記号過程と自動化に求められる社会知”
計測と制御, Vol.46 (12), pp. 945-950 .(2007) - T. Taniguchi, T. Sawaragi,
Incremental Acquisition of Behaviors and Signs based on Reinforcement Learning Schema Model and STDP
Advanced Robotics, Vol.21 (10), pp. 1177-1199 .(2007)[PDF] - T. Taniguchi, K. Ogawa, and T. Sawaragi
“Implicit estimation of other’s intention without direct observation of actions in a collaborative task: Situation-Sensitive Reinforcement Learning”,
SICE Annual Conference 2007, in CD-ROM .(2007)SICE Annual Conference 2007 International Award Finalist ノミネート[PDF] - 谷口忠大,小川賢治,椹木哲夫
“動的目標変化を含む協調タスクに対する状況弁別型強化学習機構の適用”,
第50回システム制御情報学会研究発表講演会,, .(2006) 2007年システム制御情報学会学会賞「奨励賞」+「砂原賞」受賞 [PDF]

![ビブリオバトル[知的書評合戦]](img/bn_biblio.jpg)
