
5.模倣学習の本質的理解と工学的実現への計算論的接近
模倣学習の計算論的理解はしばしば安易に「提示された軌道の学習と再生」,つまり時系列の教師有り学習として捉えられる事があるが,実際に人間が行ってい る模倣学習には,その単純な描像では捉え切れていない問題が種々存在する.
他者の身体座標を如何に自らの身体に対応づけるかという身体部位対応問題や,相 手の行動を軌跡のレベル,目的のレベルなど如何なるレベルで模倣するのかという模倣のレベルの問題などがある.これらの問題の中で申請者等は
- (a)見真似 による学習(模倣学習)と試行錯誤による学習(強化学習)を如何に効率的に連携させるか,
- (b)模倣者が養育者の連続的な時系列から如何にして真似るべき 系列を抽出するか,
の二つの問題に対して研究を行った.
(a)については,模倣の結果を強化学習の初期方策として利用するのみならず,その後の強化学習で用いる副報酬の生成に利用し,模倣学習と強化学習の効率的な結合を図った.
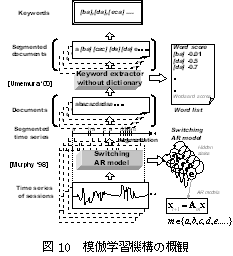
(b)については,NICT音声言語グループと協同で研究を行っている.人間の自然な動作系列をロボットが観測を続け,意味のあるセグメントを自律的に切 り出し学習する事で,プログラミングや明示的な教示といった,人間の幼児との関わり合いでは行うことのない,ユーザの特別な作業を経ることなく,ロボット が多様な振る舞いを獲得する枠組みを提案している.特徴的な点は,運動学習であるにもかかわらず,ユーザの動作系列群から意味のあるセグメントを自律的に 切り出す技術に,Webページの解析などで用いられているテキストマイニング技術のキーワード抽出技法を用いている点である.
今後はNICTが有する ヒューマノイドロボットInfanoidに当該技術を実装し,「ユーザとの自然なインタラクションから勝手に真似るロボット」の実現を目指す.当共同研究 は着任後も継続の予定である.このような人との関わり合いの中で自らの行動多様性を生み出していく適応性を有したロボットは,人間と関わり合うロボットの 市場に新たなインパクトを与えると考えられる.
関係する論文

![ビブリオバトル[知的書評合戦]](img/bn_biblio.jpg)
